Welche Rolle spielen annotierte Daten bei der Entwicklung autonomer Fahrzeuge?
Data Annotation ist für die Weiterentwicklung und Verbesserung autonomer Fahrzeuge von entscheidender Bedeutung und ermöglicht es, ML-Algorithmen Entscheidungen beizubringen. Der Begriff Data Annotation umfasst dabei die sorgfältige Beschriftung verschiedener Elemente in Sensordaten wie Bildern, LiDAR-Scans und Radaraufnahmen, um Kontext für die Algorithmen bereitzustellen.
Annotationen umfassen typischerweise die Identifizierung von für Algorithmen relevanten Objekte wie Fußgänger, Fahrzeuge und Verkehrsschilder sowie die Abgrenzung von Fahrspuren und anderen relevanten Merkmalen der Umgebung. Hochwertige Annotationen bilden also die Grundlage für autonome Fahrzeuge, ihre Umgebung genau wahrzunehmen und zu interpretieren. Autonome Fahrzeuge der neuesten Generation müssen in der Lage sein, sich in komplexen realen Szenarien präzise und sicher zurechtzufinden. In diesem Artikel werfen wir einen Blick auf Data Annotation als Treibstoff für die Entwicklung moderner autonomer Fahrzeuge.
Welche Daten sind für die Entwicklung autonomer Fahrzeuge relevant?
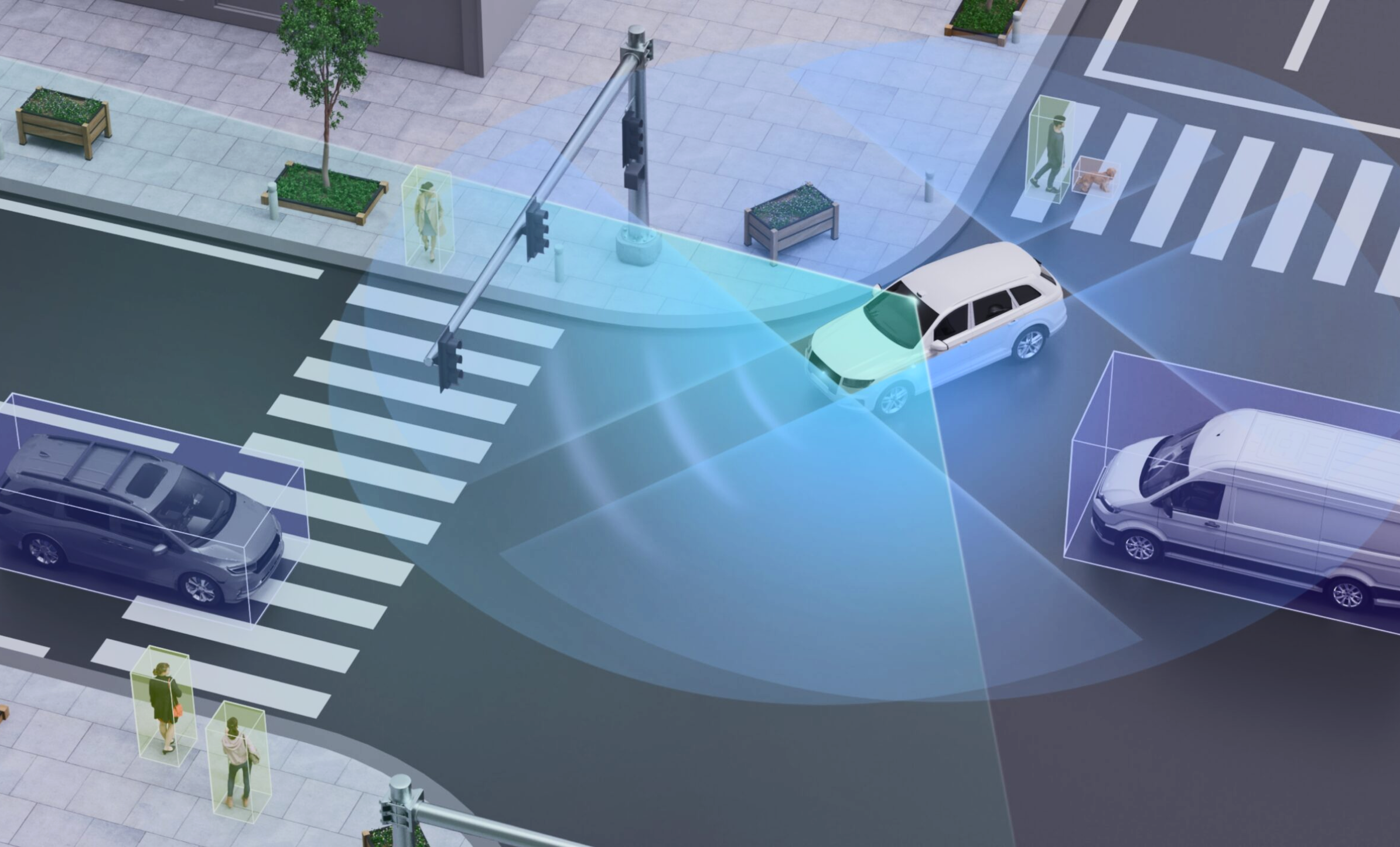
Daten können als Treibstoff für die Entwicklung moderner autonomer Fahrzeuge betrachtet werden und bilden die Grundlage für ihre Intelligenz. Während des gesamten Entwicklungszyklus werden riesige Datenmengen von verschiedenen Sensoren wie Kameras, LIDAR, Radar und GPS gesammelt, die umfassende Informationen über die Umgebung des Fahrzeugs und seine Interaktionen mit der Umwelt liefern. Diese Rohdaten werden dann sorgfältig aufbereitet und gekennzeichnet, um genau den Kontext und die dazugehörigen Beschriftungen bereitzustellen, die für das Trainieren komplexer Algorithmen für maschinelles Lernen erforderlich sind.
Durch die Verarbeitung umfangreicher Daten lernen autonome Fahrzeuge, Objekte zu erkennen und zu interpretieren, Verkehrsschilder zu verstehen, die Bewegungen von Fußgängern vorherzusagen und komplexe Verkehrsszenarien zu navigieren. Daten aus echten Fahrten werden kontinuierlich in das System eingespeist, mit denen iterative Feinabstimmungen der Algorithmen und eine ständige Verbesserung der Leistung, Sicherheit und Anpassungsfähigkeit erzielt werden. Letztendlich führt die effektive Nutzung von Sensordaten zu einer ständigen Weiterentwicklung autonomer Fahrzeugtechnologien und bringt uns der Realisierung vollständig autonomer Transportsysteme näher, die in der Lage sind, in unterschiedlichen realen Umgebungen zuverlässig und sicher zu funktionieren.
Übersicht über für autonome Fahrzeuge relevante Daten
- Bilder: Von Kameras aufgenommene Bilder der Umgebung Ortung von Fußgängern, Erkennung von Verkehrsschildern und Objekten
- Videos: Eine kontinuierlich aufgenommene Serie von Bildern, die zeitliche Informationen enthält. Bewegungsprognosen und Verhaltensanalysen
- 3D-LiDAR Daten: Aus LiDAR Sensoren gewonnene dreidimensionale Informationen über die Form und Oberflächeneigenschaften der umgebenden Objekte Kartierung der Umgebung und Identifizierung von Hindernissen
- Propriozeptive Sensordaten: Technische Informationen über den Fahrzeugzustand, Ereignisse und Fehler (GPS-Standort, Lenkwinkel und Geschwindigkeit) Verhaltensanalysen und Selbstbeobachtung
- Exterozeptive Sensordaten: Abstandsmessungen zwischen dem Auto und seiner Umgebung Erkennung von Objekten und Vermeidung von Unfällen
Welche Objekte sind für autonome Fahrzeuge relevant?
Trainingsdaten, die in der Entwicklung autonomer Fahrzeuge verwendet werden, enthalten verschiedene annotierte Objekte, um ein besseres Verständnis der Umgebung und eine effektive Navigation zu erzielen. Zu den relevantesten Objekten, die typischerweise annotiert werden, gehören:
- Fahrzeuge – Die Kennzeichnung anderer Fahrzeuge in der Umgebung ist für autonome Fahrzeuge von entscheidender Bedeutung, um in der Nähe befindliche Autos, Lastwagen, Motorräder, Fahrräder und andere Fahrzeuge auf der Straße erkennen und verfolgen zu können.
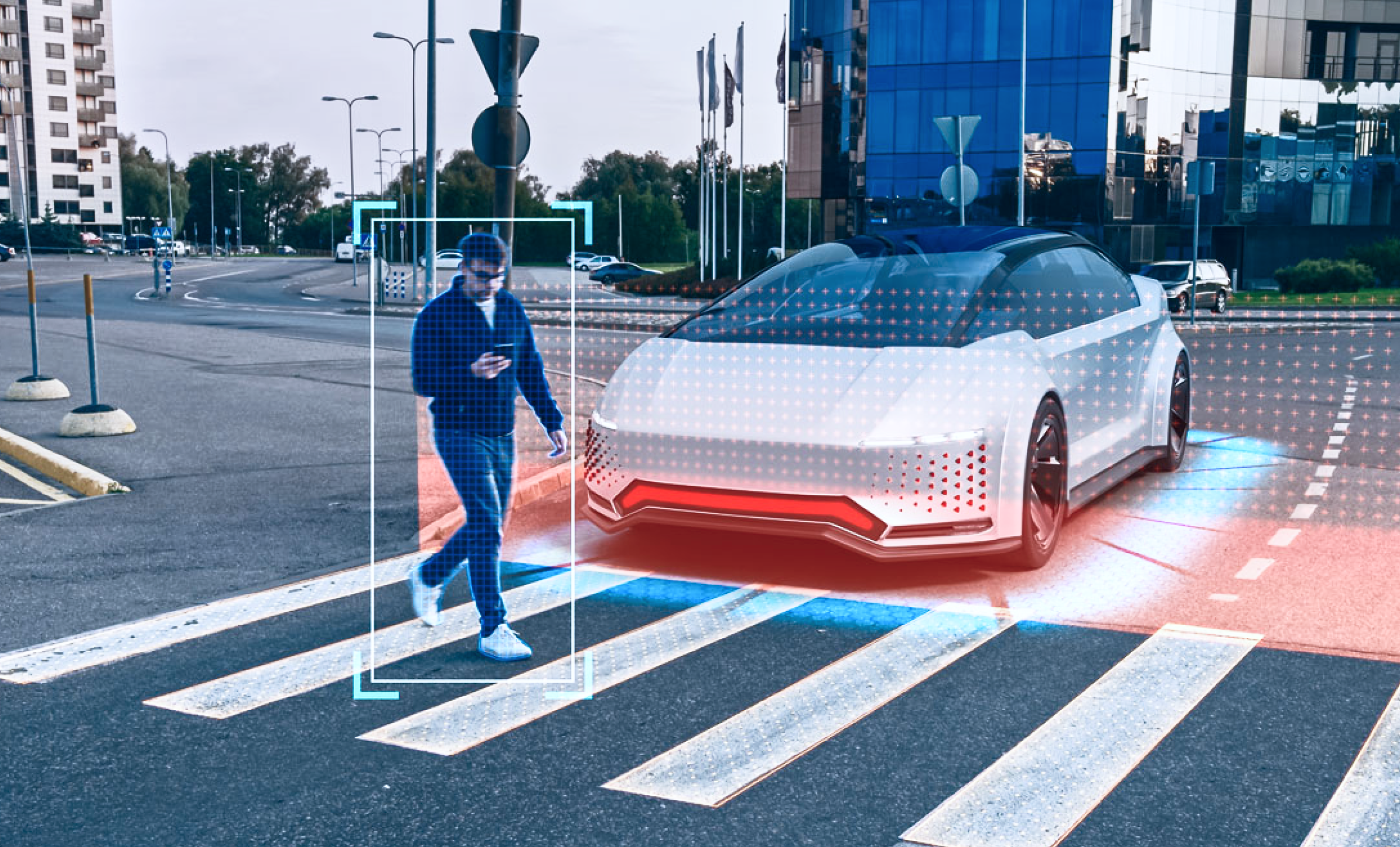
- Fußgänger – Fußgänger, zu denen Erwachsene, Kinder und Tiere zählen, müssen genau erfasst werden, um sicherzustellen, dass sie erkannt und ihre Bewegungen vorhergesagt werden können, um Unfälle zu vermeiden.
- Radfahrer – Autonome Fahrzeuge müssen auch Radfahrer auf der Straße erkennen und ihr Verhalten vorhersagen können, einschließlich ihrer Geschwindigkeit, Richtung und möglichen Interaktionen mit anderen Verkehrsteilnehmern.
- Verkehrsschilder und Verkehrssignale – Durch die Annotation von Verkehrsschildern, Ampeln und anderen Verkehrssignalen können autonome Fahrzeuge lernen behördliche Informationen wie Geschwindigkeitsbegrenzungen, Stoppschilder, Verkehrssignale und Fahrbahnmarkierungen zu erkennen und interpretieren.
Welche Arten von Datenannotation spielen bei der Entwicklung autonomer Fahrzeuge eine Rolle?
Bei der Erstellung von Trainingsdaten für autonome Fahrzeuge spielen verschiedene Arten von Datenannotation eine Rolle, mit denen Sensordaten annotiert werden. Einige der dabei häufig vorkommende Arten von Datenannotation sind:
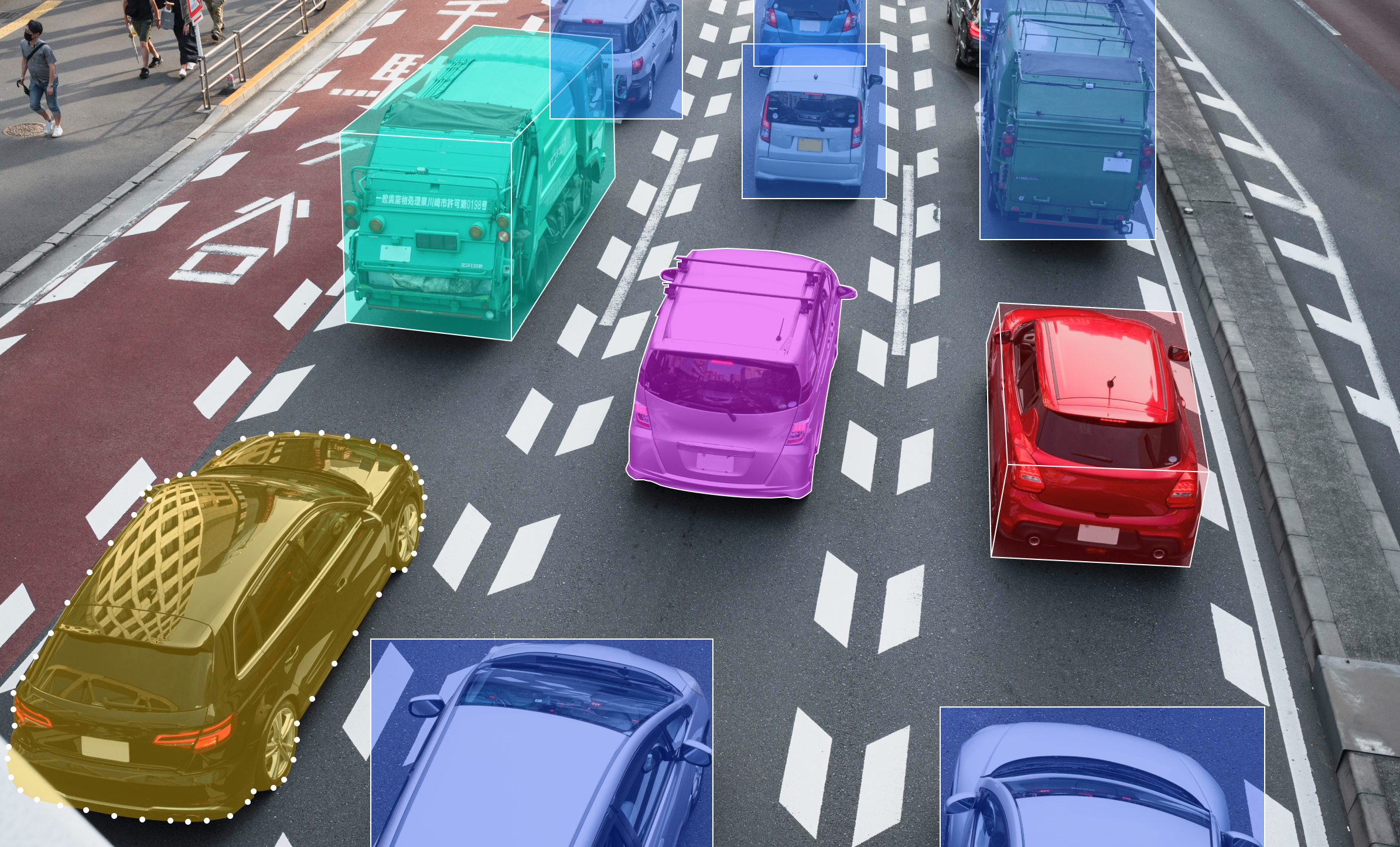
- Begrenzungsrahmen (Bounding Boxes) – Begrenzungsrahmen sind Rechtecke, die um relevante Objekte wie Fahrzeuge, Fußgänger, Radfahrer und Hindernisse gezogen werden, um deren Position und Größe innerhalb eines Bildes oder Frames anzuzeigen.
- Erstellen von Segmenten mittels Polygonen – Bei der Annotation mit Polygonen werden relevante Objekte in Bildern mit Polygonen umrandet. Dadurch können Algorithmen wichtige Objekte von dem Hintergrund des Bildes unterscheiden.
- Semantische Segmentierung – Bei der semantischen Segmentierung wird jedem Pixel in einem Bild eine Kennzeichnung oder Kategorie zugeordnet, beispielsweise Straße, Fahrzeug, Fußgänger oder Hintergrund. Ein Verständnis eines Bildes auf Pixel-Ebene liefert detaillierte Informationen über in einer Szene vorhandene Objekte und Bereiche.
- Annotation mit 3D-Begrenzungsboxen – Bei dieser Art der Annotation werden dreidimensionale Quader um relevante Objekte wie andere Fahrzeuge gezeichnet. So können Algorithmen die relevanten Objekte besser identifizieren und messen.
- Annotation von Orientierungspunkten – Bei der Landmark Annotation werden interessante Punkte oder Merkmale in Bildern gekennzeichnet, mittels derer KI-Modelle sie identifizieren und verfolgen können. Diese Methode, Daten zu annotieren, findet in Computer Vision und in der Robotik Anwendung.
Wofür werden annotierte Trainingsdaten bei der Entwicklung autonomer Fahrzeuge verwendet?
Annotierte Trainingsdaten werden zu verschiedenen Zwecken verwendet, beispielsweise:
- Objekterkennung – Bei dieser Computer Vision Aufgabe geht es darum, Objekte in einem Bild oder Video zu identifizieren und zu lokalisieren. Im Gegensatz zur Bildklassifizierung, bei der einem ganzen Bild eine einzige Bezeichnung zugewiesen wird, werden mehrere relevante Objekte wie Fußgänger, Straßenschilder oder andere Fahrzeuge in einem Bild identifiziert und ausgewertet.
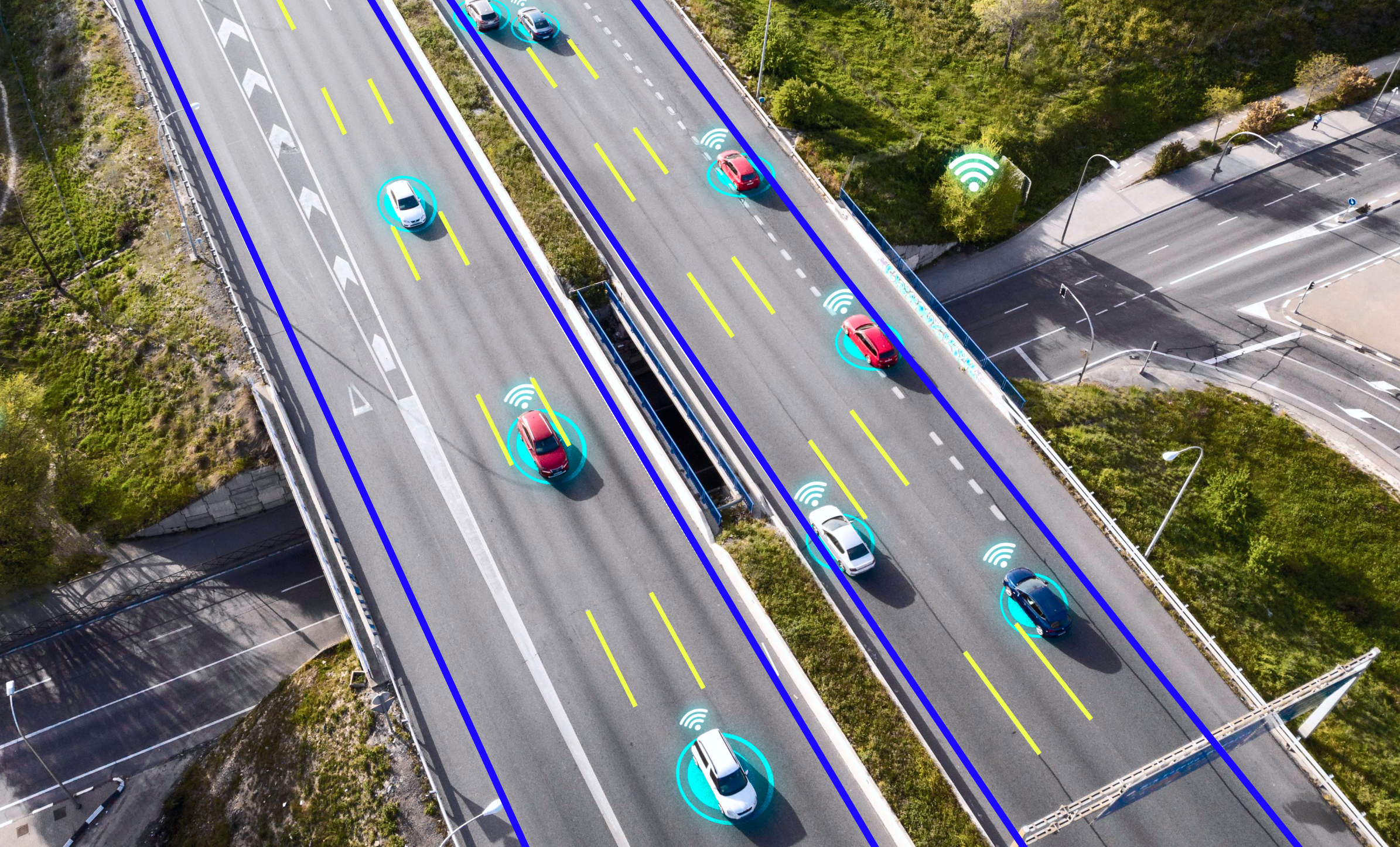
- Fahrspurerkennung – Die Annotation von Fahrbahnmarkierungen, Nachbarspuren, Straßenrändern und Bordsteinkanten hilft autonomen Fahrzeugen, den Straßenverlauf zu verstehen und während der Navigation innerhalb der ihnen zugewiesenen Spur zu bleiben.
- Kartierung und Lokalisierung – Dabei werden wichtige Merkmale und Orientierungspunkte in Sensordaten gekennzeichnet, um detaillierte Karten zu erstellen und eine präzise Lokalisierung für autonome Fahrzeuge zu ermöglichen. Die annotierten Daten werden bei der Entwicklung robuster Lokalisierungsalgorithmen und Kartierungstechniken verwendet, die für die autonome Navigation unerlässlich sind.
- Trajektorienplanung – Mit Hilfe von karten- bzw. sensorbasierten Daten wird eine Trajektorie generiert, die als Sollgröße für eine nachgelagerte Regelung des Fahrzeuges dient. Dabei werden die Umgebung, mögliche zukünftige Zustände, Fahrkomfort und andere Aspekte berücksichtigt.
Wieso brauchen autonome Fahrzeuge annotierte Trainingsdaten?
Annotierte Trainingsdaten werden verwendet, um Modelle für maschinelles Lernen zu trainieren. Bei der Entwicklung autonomer Fahrzeuge bedeutet dies eine verbesserte Wahrnehmung, Interpretation und Anpassung an die Umgebung, bessere Entscheidungsfindung, mehr Sicherheit und eine bessere Navigation im Straßenverkehr. Ohne annotierte Daten wäre die Entwicklung und Einführung autonomer Fahrsysteme stark eingeschränkt und ihre Fähigkeit, sicher und effektiv auf öffentlichen Straßen zu funktionieren, beeinträchtigt.
So verarbeitet Mindy Support Daten autonomer Fahrzeuge
Die Annotation Sensordaten und andere für die Entwicklung autonomer Fahrzeuge relevante Daten durch Mindy Support umfasst die Beschriftung verschiedener Elemente innerhalb der Daten, um Kontextinformationen für das Training von ML-Modellen bereitzustellen und die Wahrnehmungs- und Entscheidungsfähigkeiten der autonomen Fahrzeuge zu verbessern. Bei der Annotation von relevanten Objekten, Hindernissen oder Straßenmarkierungen greifen wir auf eine Vielzahl an verfügbaren Data Annotation Tools zurück. Die eingesetzten Data Annotation Tools reichen von grafischen Benutzeroberflächen (GUIs), über Eigenentwicklungen bis hin zu Annotationsplattformen von Drittanbietern. Alle annotierten Daten durchlaufen einen Prozess zur Qualitätssicherung, bei dem Annotationen auf Fehler geprüft werden, um eine höchstmögliche Genauigkeit (95%-99%) und Konsistenz sicherzustellen.
Abschließende Gedanken zum Mehrwert präzise annotierter Daten für autonomes Fahren
Auch wenn dies meist im Hintergrund stattfindet, sind annotierte Trainingsdaten für die Entwicklung autonomer Fahrzeuge unverzichtbar. Ohne sie hätten sie Schwierigkeiten, ihre Umgebung genau wahrzunehmen, fundierte Entscheidungen zu treffen, sicher zu navigieren, sich an unterschiedliche Bedingungen anzupassen und ihre Leistung im Laufe der Zeit kontinuierlich zu verbessern. Ob sich autonome Fahrzeuge ohne Trainingsdaten auf unseren Straßen finden würden, ist fraglich. Den größten Mehrwert allerdings zieht man aus präzise annotierten Daten, denn wenn es um Menschenleben geht, kann es keine Kompromisse bei der Qualität der annotierten Daten geben!
Häufig gestellte Fragen
1. Was ist Data Annotation und warum ist dies für die Entwicklung autonomer Fahrzeuge wichtig?
Bei der Annotation werden verschiedene Elemente in Sensordaten, Bildern und Videos gekennzeichnet, beispielsweise andere Verkehrsteilnehmer, Straßenmarkierungen oder Hindernisse, um kontextuelle Informationen für ML-Modelle bereitzustellen. Autonome Fahrzeuge können so lernen ihre Umgebung wahrzunehmen, bei der Navigation fundierte Entscheidungenzu treffen und Unfälle vermeiden.
2. Welche Arten von Daten werden bei der Entwicklung autonomer Fahrzeuge annotiert?
Bei der Erstellung von Trainingsdaten für autonome Fahrzeugen werden typischerweise andere Verkehrsteilnehmer wie Fahrzeuge, Fußgänger oder Radfahrer, Verkehrszeichen und Straßenmarkierungen sowie andere relevante Elemente in Sensordaten, die von Kameras, LIDAR, Radar und GPS erfasst werden, annotiert.
3. Wie werden Sensordaten annotiert?
In der Regel wird speziell für Sensordaten entwickelte Software eingesetzt, um relevante Objekte mit Begrenzungsrahmen oder Polygonen zu umranden oder Klassenbezeichnungen zuzuweisen. Annotatoren können auch Attribute wie Geschwindigkeit, Richtung oder Größe verschiedener Verkehrsteilnehmer annotieren.